5月23日至25日,“船视宝”杯第二十届全国大学生交通运输科技大赛在集美大学举行。本届大赛以“以新质生产力赋能绿色智慧交通”为主题,设本科生赛道、研究生赛道以及新增的台港澳学生赛道,共收到来自全国144所高校的1232件参赛作品,经初赛评审,87所高校,266件作品入围决赛。决赛采用现场公开答辩的方式进行,来自高校、企业的60位专家的严格评审。我校共有10支队伍进入全国决赛,经过激烈的答辩和对决,以卓越的表现在比赛中脱颖而出,斩获一等奖4项、二等奖4项,三等奖2项,获奖率100%,创历史最佳成绩!
以下是我校获奖名单:
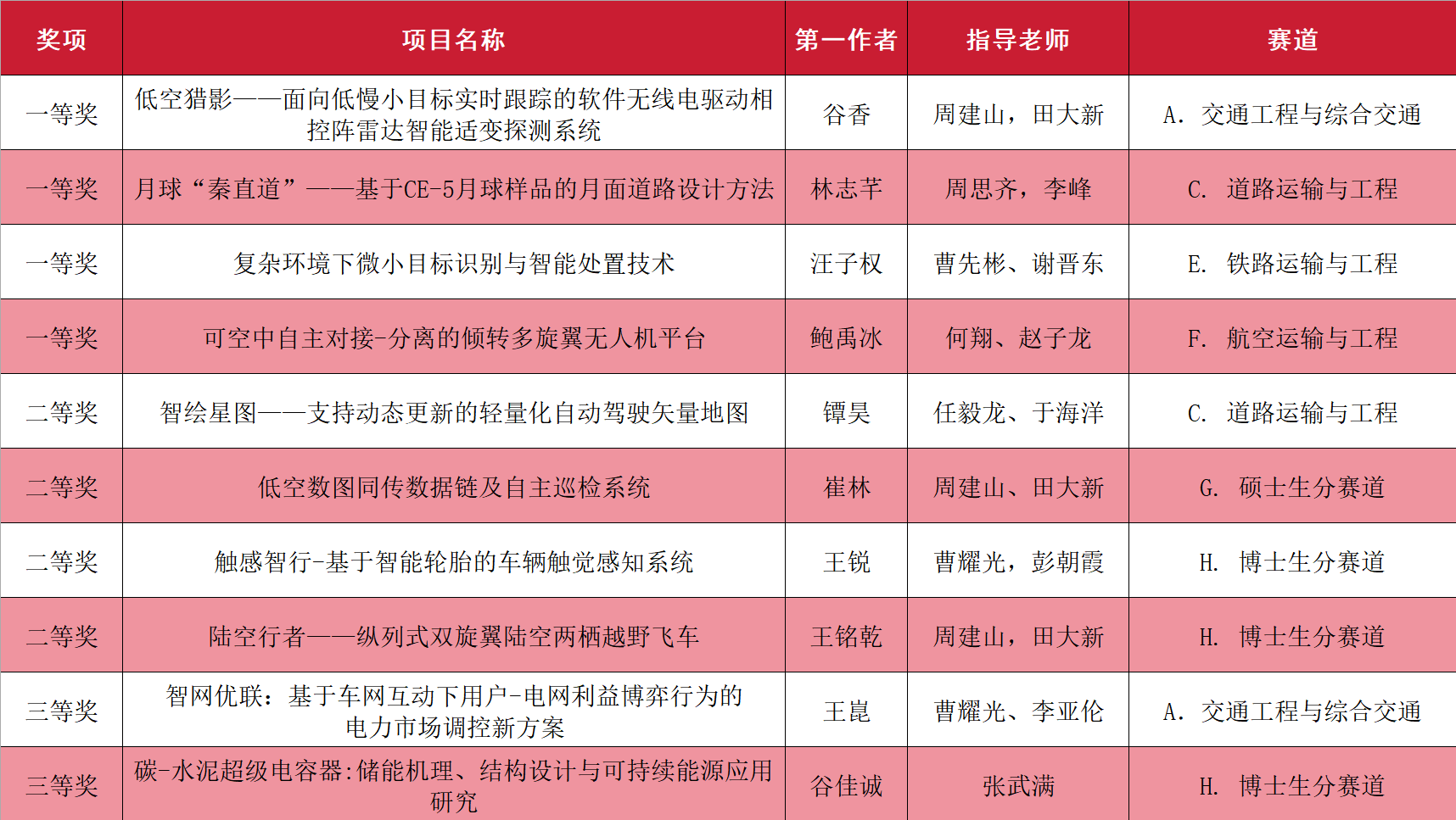
获奖项目
低空猎影——面向低空低慢小目标实时跟踪的软件无线电驱动相控阵雷达智能适变探测技术及原型系统

全部作者:谷香,彭昊俐,刘冬阳,张一驰,吴思漫
指导老师:周建山,田大新
项目介绍:低空、慢速、小型(低慢小)运动目标的全天候探测与跟踪是当前空-天-信交叉领域的核心挑战。本项目融合先进人工智能模型算法、软件无线电及微天线阵列技术,研发低慢小目标智能适变探测技术,集成发展出相控阵雷达原型系统。对原型系统开展实地验证,证明其探测跟踪性能良好。项目成果在某立体跨域无人平台和河南省“车路空天”一体化感知系统工程中得到应用,为低慢小目标实时探测与跟踪提供关键技术与原型系统。
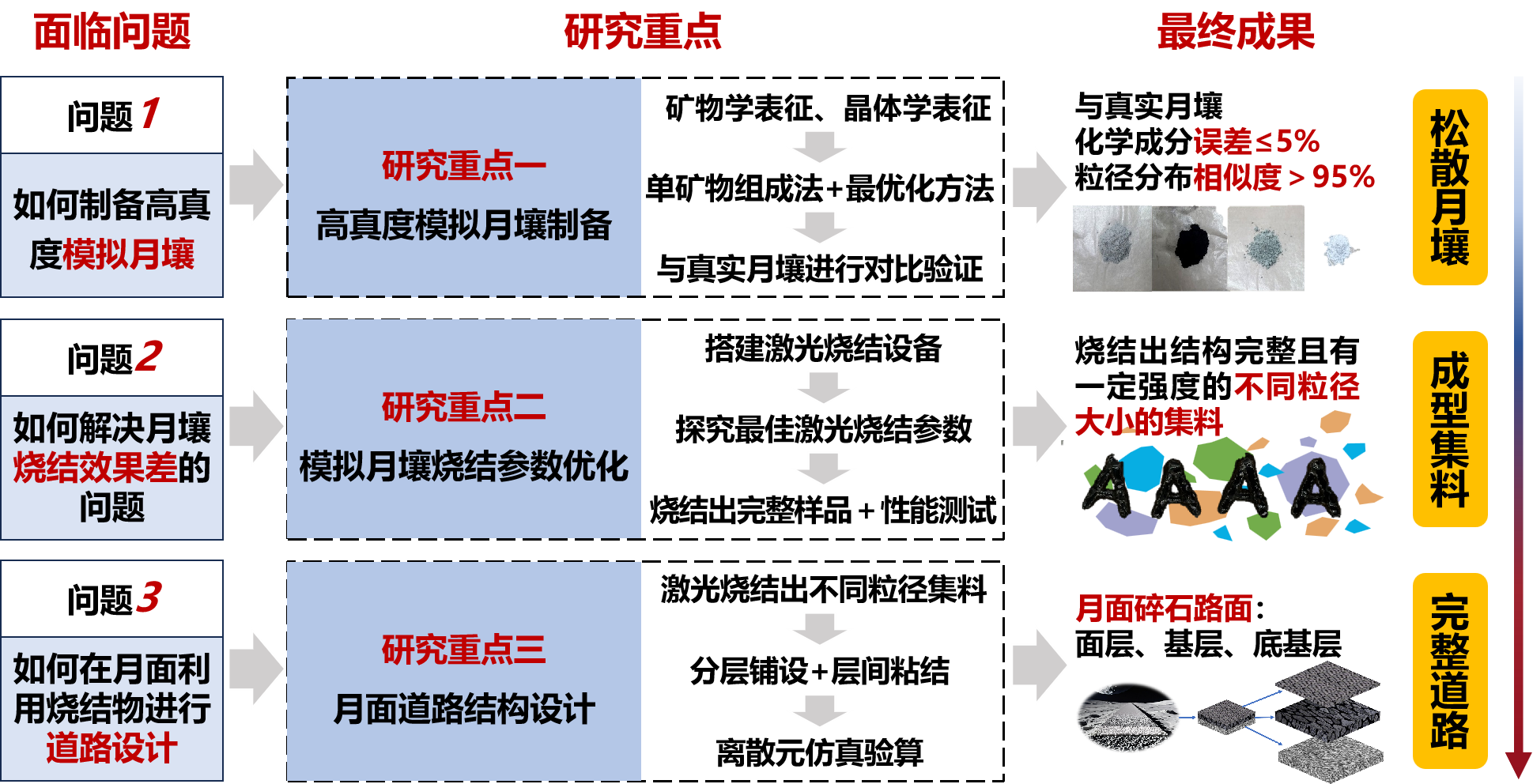
月球“秦直道”——基于CE-5月球样品的月面道路设计方法

全部作者:林志芊,冯沁心,谢铠舟,孔瑞瑞,王贵成
指导老师:周思齐,李峰
项目介绍:本研究基于嫦娥五号月球样品,通过多维度表征确定月壤主要矿物成分,制备出高仿真模拟月壤BH-3,其与真实月壤化学成分误差≤5%、粒径分布相似度>95%。通过激光烧结实验,发现优化激光功率和补粉工艺可提升烧结样品完整性,能烧结不同粒径集料。提出月面碎石路面分层结构,借助激光烧结技术规划完整建造流程,离散元仿真验证其应力分布均匀、能有效传荷载。成果有望为月球基地提供就地取材、低成本道路建造方案,攻克月壤原位利用难题。
复杂环境下微小目标识别与智能处置技术


全部作者:汪子权,丁小轩,李庆,鄂宣圳,常诗雨
指导老师:曹先彬,谢晋东
项目介绍:针对微型及轻型旋翼无人机在续航能力和任务载荷方面的局限性,提出了一种微型横列式双旋翼无人机的系统设计方案,通过机电系统建模与动力系统试验完成了无人机能源与动力系统的选型优化,通过优化机身结构设计和进行动力学建模确定机身相关参数,通过计算机仿真和实际飞行测试验证了所设计无人机的飞行性能和效率。设计并制作的双旋翼无人机重量仅为232.8克,在245.5克的带载荷重量下悬停飞行时间为62分11秒。
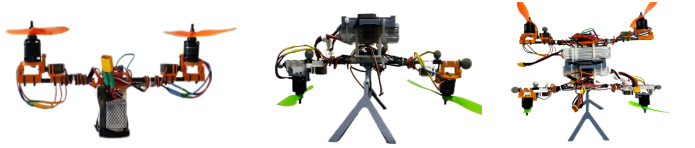
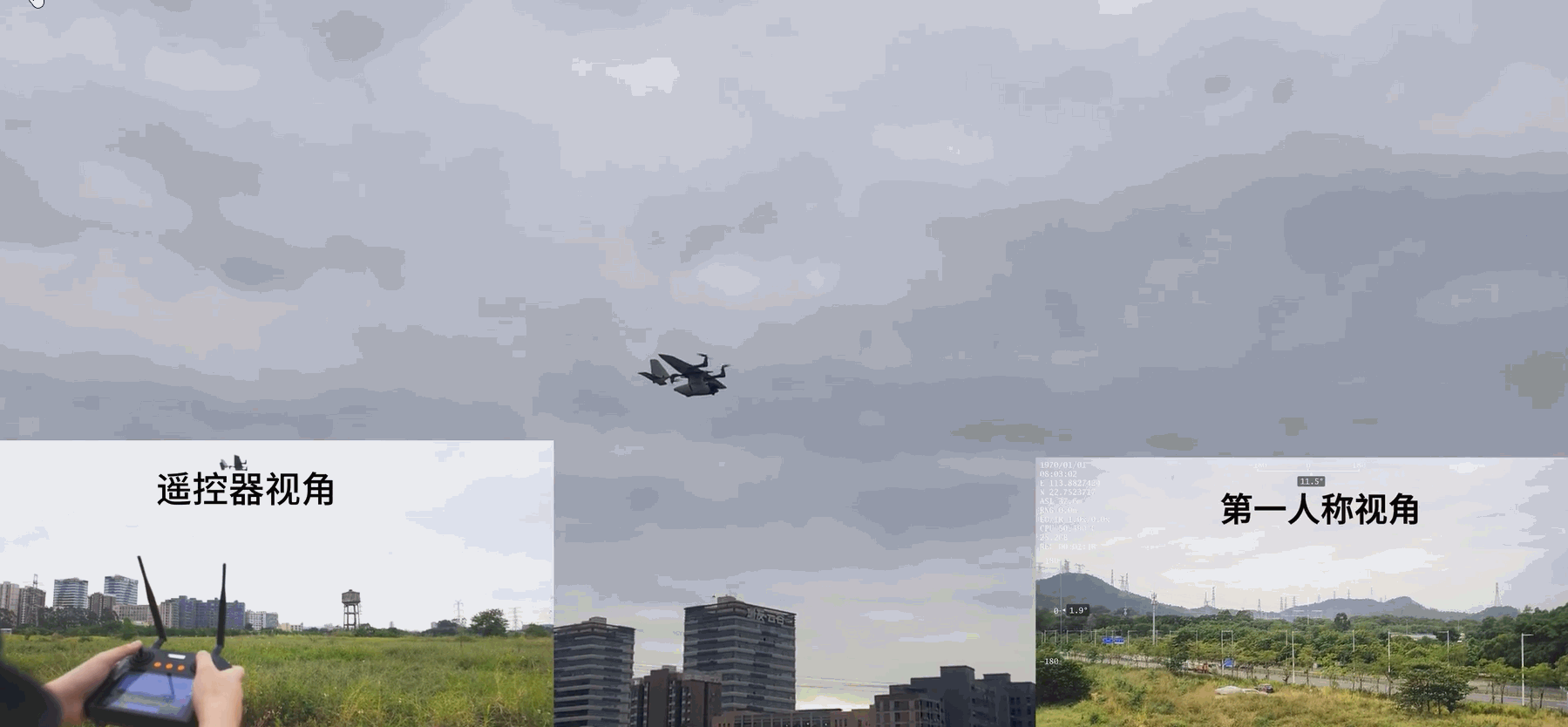
空中自主对接-分离的倾转多旋翼无人机平台
全部作者:鲍禹冰、刘英伦、梁浩源、呙洋、艾烊
指导老师:何翔、赵子龙
项目介绍:“可空中自主对接-分离的倾转多旋翼无人机平台”项目综合双旋翼与倾转四旋翼优势,采用磁力对接机构实现了具有自主对接分离能力的微小型集成平台。项目独创性提出基于桨盘倾角负反馈的智能控制算法,创新设计倒飞双旋翼气动构型,攻克双旋翼无人机复杂环境下姿态控制稳定性难题;通过自主研发的高精度对接机构与轨迹算法,首次实现微小型无人机空中自主对接与分离。系统具备响应速度快、机动性能强、协同作业效率高等优势,在高楼清洁、高层灭火、电力巡检、应急救灾等领域应用前景广阔。
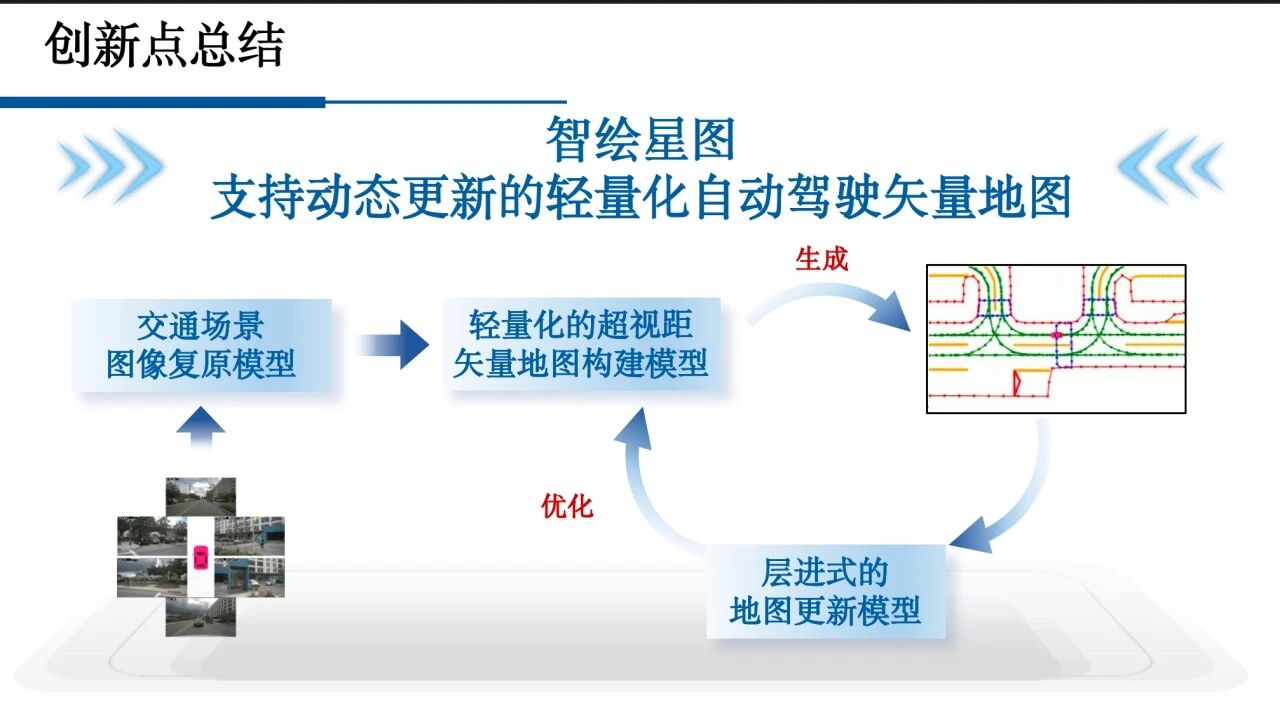
智绘星图——支持动态更新的轻量化自动驾驶矢量地图

全部作者:镡昊、闫子阳、章雨初、刘盎、王启越
指导老师:任毅龙、于海洋
项目介绍:项目团队围绕“支持动态更新的轻量化自动驾驶矢量地图”开展研究,解决了恶劣天气条件地图元素感知难,复杂场景在线建图难和众包融合地图更新难等难题,重点突破三大关键技术,研发了轻量化的“智绘星图”在线建图与动态更新系统,并在两家企业开展测试应用。系统所提出的模型在兼顾30FPS推理速度的同时,取得了74.7%的建图精度,有效支撑了自动驾驶系统对交通环境的实时感知。项目申请发明专利12项,授权3项,发表IEEE IV论文1篇,投稿TITS论文1篇。
低空数图同传数据链及自主巡检系统
全部作者:崔林、庞皓冰、刘朕鑫、杨旭、宁家林
指导老师:周建山、田大新
项目介绍:自主巡检系统在智慧城市、电力巡检等领域应用广泛,但在夜间、雾霾等复杂环境下存在图像质量差、传输不稳定等问题。本研究提出两项创新技术:基于深度学习的多模态视觉增强算法,通过自适应光照补偿和噪声抑制提升图像清晰度;动态信道感知的异构数据优化算法,采用分层编码和优先级传输降低丢包率和时延。研发了集成三轴云台与高性能ISP芯片的智能处理系统,结合飞行器平台实现自主避障与路径规划。测试表明,该系统在极端环境下性能显著优于传统方案,为复杂场景巡检提供了高效解决方案。
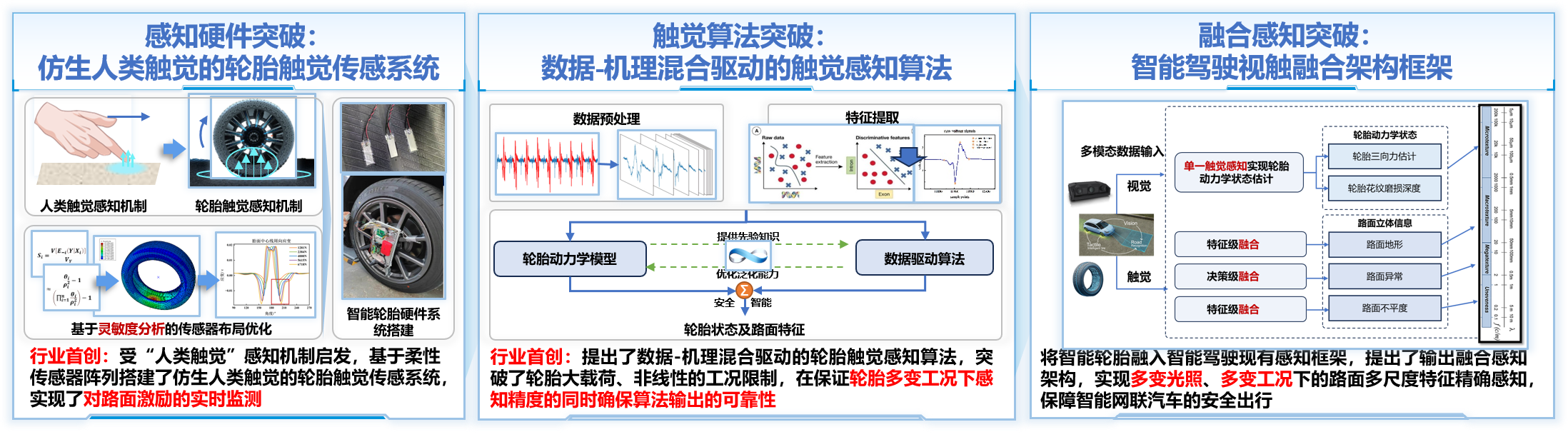
触感智行-基于智能轮胎的车辆触觉感知系统
全部作者:王锐,陈昱伊,尚家琛,童泽翔,徐健一
指导老师:曹耀光,彭朝霞
项目介绍:路面状态对车辆行驶安全至关重要,湿滑/结冰路面易引发事故。智能轮胎通过内嵌传感器直接感知路面激励,克服了传统方法的局限,但面临感知元件易损、激励解耦难等问题。团队首创仿生触觉的轮胎传感系统,开发数据-机理混合驱动算法,实现实时路面状态感知,并融合视觉与触觉构建智能驾驶感知方案。与玲珑轮胎合作完成多场景测试,与小米汽车、金龙客车等验证实车应用。项目提升智能网联汽车多维感知能力,保障行车安全。
陆空行者——纵列式双旋翼陆空两栖越野飞车
全部作者:王铭乾,徐子璇,陈妍妍,殷鸿博,肖啸
指导老师:周建山,田大新
项目介绍:随着低空经济的快速发展,飞行汽车在应急救援、快速投送等领域展现出广阔的应用前景。在非结构化越野环境中,崎岖地形、空气湍流等复杂因素交互作用,对飞行汽车顺利执行任务带来了严峻挑战,亟需探索先进的环境感知与智能控制技术,并设计适用于越野场景下的飞行汽车新构型,以期提升飞行汽车在不确定干扰和复杂环境下的鲁棒控制能力。为此,“陆空行者”项目创新研制了一种非结构化场景下“稳控制、精感知、广适用”的飞行汽车。
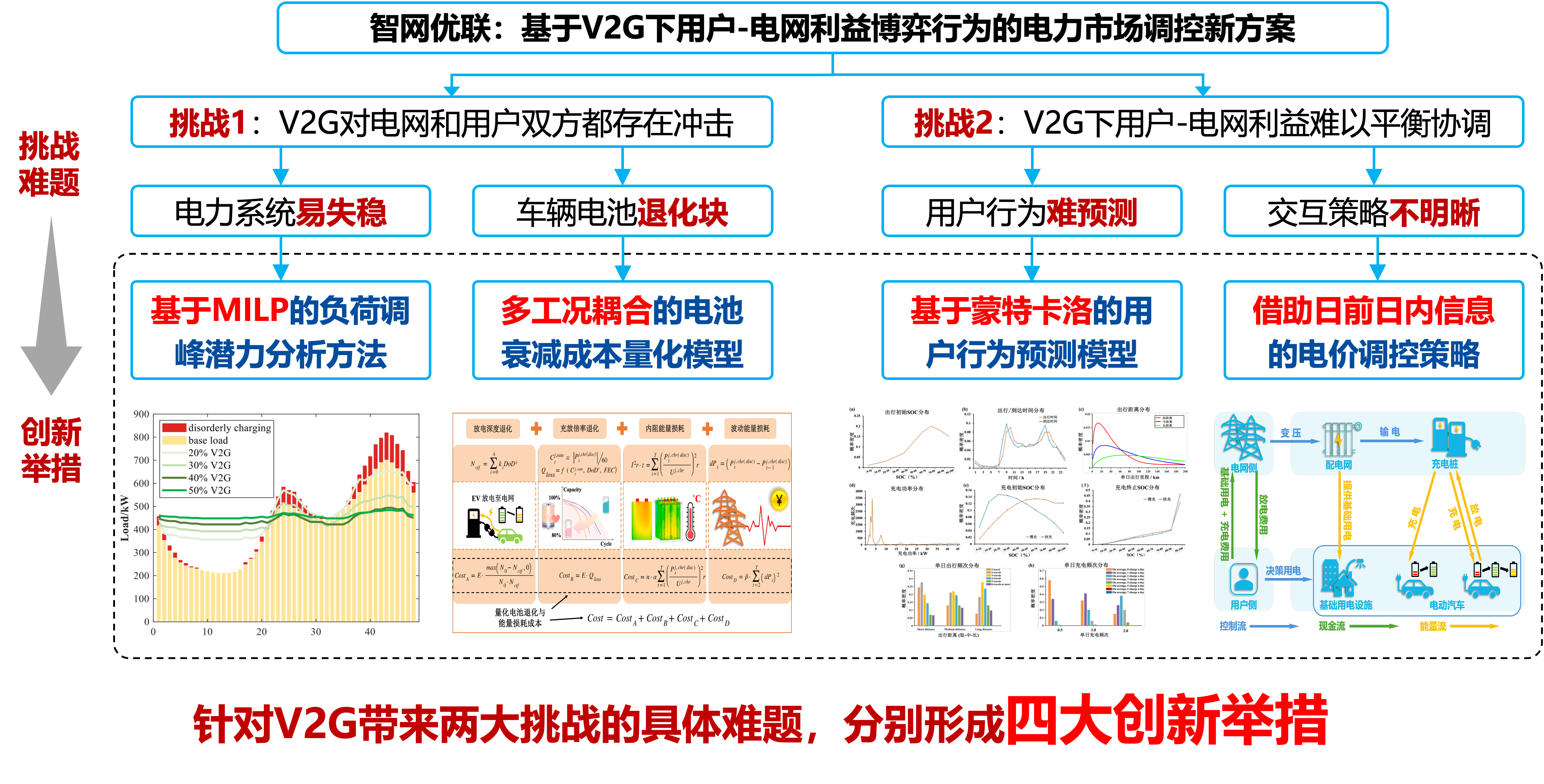
智网优联:基于车网互动下用户-电网利益博弈行为的电力市场调控新方案
全部作者:王崑、杨昊益、彭博、王润新
指导老师:曹耀光、李亚伦
项目介绍:针对车网互动 (V2G) 技术普及过程中的电力系统易失稳、车辆电池退化快、用户行为难预测、交互策略不明晰这四大挑战,团队提出了协调车网双方利益目标的电力市场调控方案,并在北京市一社区进行系统验证:V2G参与率达30%时,负荷的相对波动性从31.81%降至5.19%。研究以电力市场为桥梁,化解了用户与电网利益目标难以平衡协调的难题。
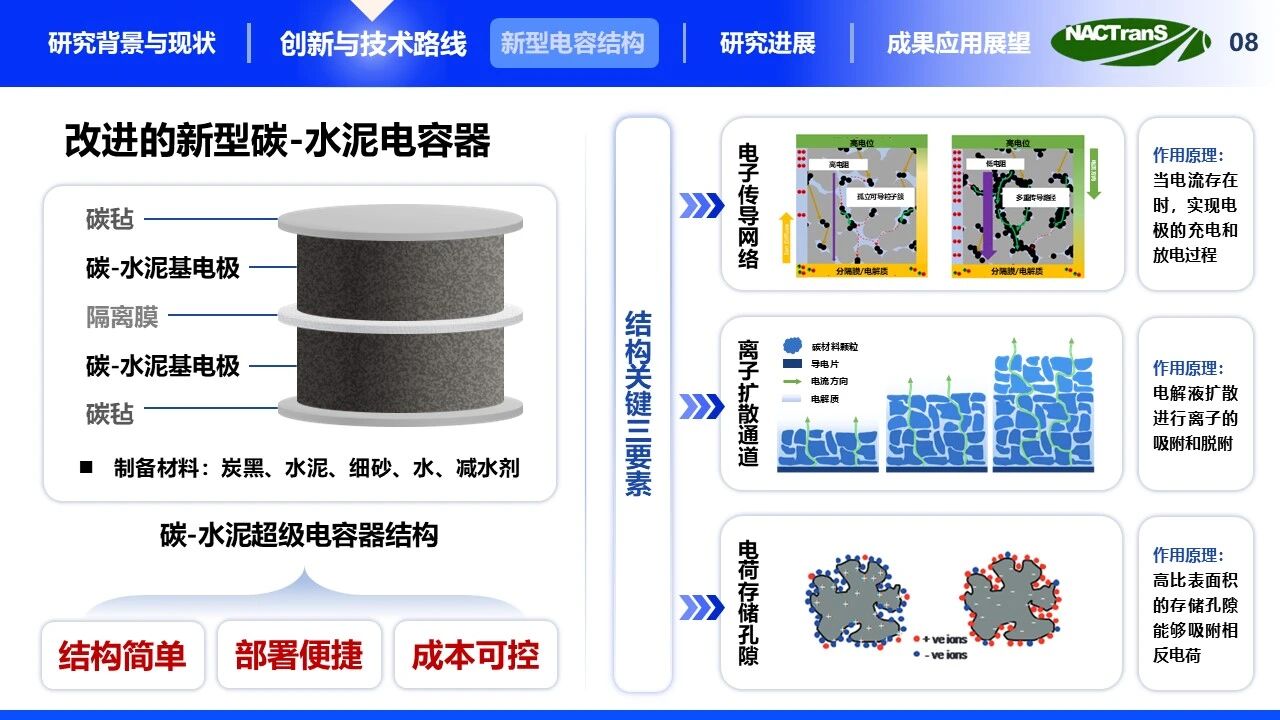
碳-水泥超级电容器:储能机理、结构设计与可持续能源应用研究

全部作者:谷佳诚,吴淑涛,王晨光,张亚博,朱嘉阳
指导老师:张武满
项目介绍:本项目探讨了碳-水泥超级电容器的储能机理、电极结构设计以及电学性能等关键问题。项目提出了一种改进的新型碳-水泥电容结构、多维度匹配描述模型以及多因素制备路径,从需求场景出发构建了针对碳-水泥体系的试验体系,制备了高比电容、长寿命和高力学强度的超级水泥基电容器。碳-水泥超级电容器在可再生能源并网、自充电道路以及交通设施智能监测等领域具有广阔的应用前景,为可持续能源系统和智慧交通的发展提供了创新方案。
向以上十支队伍表示祝贺!营造科创氛围,服务人才培养,尚德务实,求真拓新,相信北航学子未来能在科创领域再创新高!
