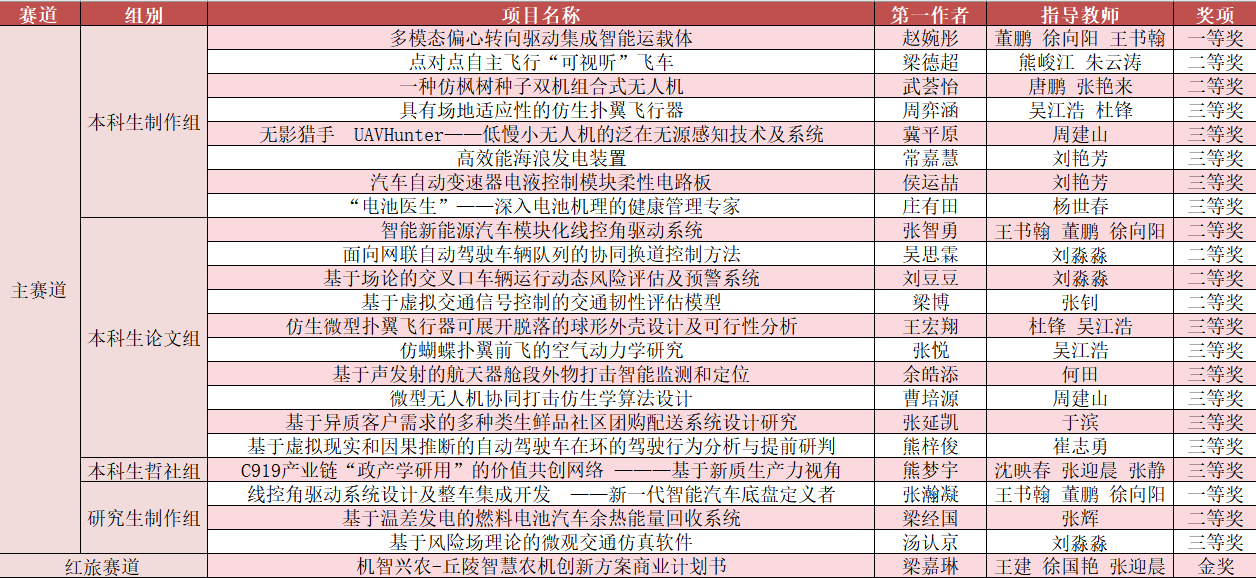
近日,第三十四届“冯如杯”竞赛圆满结束。交通科学与工程学院在本届“冯如杯”竞赛中共获得主赛道一等奖2项、二等奖7项、三等奖13项,红旅赛道金奖1项,刷新我院参加“冯如杯”竞赛的最好成绩!
比赛期间,学院共20个优秀项目参加了北航第三十四届“冯如杯”竞赛学生创新创业成果展。我院高水平学生科技创新团队——AERO大学生方程式赛车队、飞行汽车科技创新团队,江西师范大学附属中学优秀学生科技创新项目——微型轮式环境巡检机器人,也受邀参加本次展览,充分展示团队成果。

5月18日上午,校长王云鹏院士莅临我院作品展区参观,与交通学院院长杨世春、党委副书记郭祖博一同,和交通学子展开亲切交流,鼓励大家充分挖掘自身潜力,在科研的道路上不断挑战自我。他强调,作为新时代青年,要勇于探索未知领域,为国家的科技进步和社会发展贡献自己的力量。同学们纷纷表示,要牢记校长嘱托,培养科研探索精神,为实现个人价值和社会进步而不懈奋斗。

优秀项目展示
项目名称:微型轮式环境巡检机器人
项目中学:江西师范大学附属中学
全部作者:郭峻泽、吴政辰
指导老师:姚毅、赵清平
项目介绍:
本项目提出了一种创新的解决方案,将微型轮式机器人与模块化的传感器组件相结合,并将其接入物联网管理平台。通过这种方式,我们不仅可以实现对作物生长环境的远程监控和管理,并且从而建立起一种更加自动化、智能化、集成化的大棚巡检方式,同时为大范围的农作物生长阶段监测提供一种可行性方案

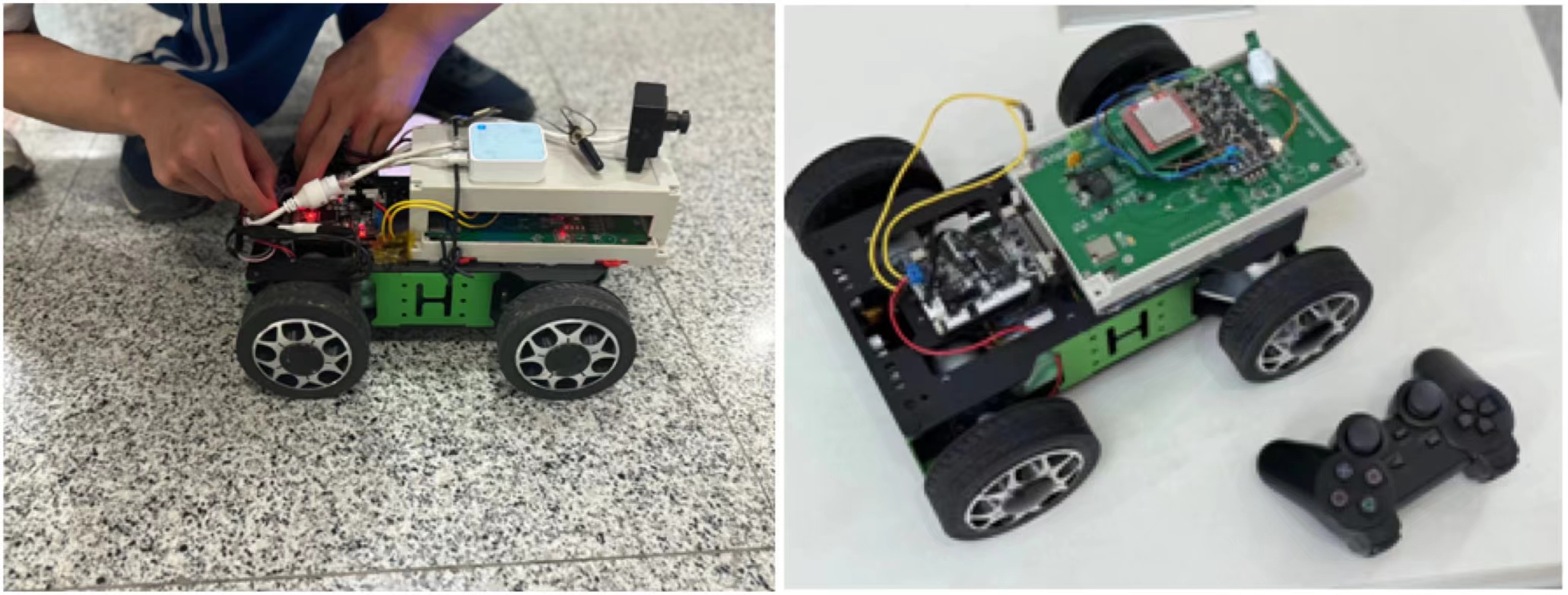
项目名称:线控角驱动系统设计及整车集成开发 --新一代智能汽车底盘定义者
全部作者:张瀚凝、赵沛燊、李俊青、彭梓熙、张存皓、孙凯晨、安子瑞
指导老师:王书翰、董鹏、徐向阳
项目介绍:
聚焦新能源汽车底盘架构技术创新,首次提出集成驱动、制动、转向、悬架于轮边的线”角驱动”方案,其中包括全自研高效多级减速轮边电机驱动、电子机械制动、360°全线控转向以及连体式双横臂独立悬架。基于“角驱动“理念,将多个“角“集成于底盘,面向用户需求实现线控底盘的系列化开发,各个“角“独立可控,最大程度解放整车自由度,覆盖原地掉头、四轮转向、横向行驶、斜向行驶四种驾驶模式,满足高阶自动驾驶控制需求。

项目名称:基于温差发电的燃料电池汽车余热能量回收系统
全部作者:梁经国、吴雨蕊、陶斯友、张永康、张思龙、陈哲、张立才
指导老师:张辉
项目介绍:
“双碳”背景下,发展燃料电池汽车是国际应对气候变化、推动绿色发展的重要战略举措,但燃料电池化学反应中约一半的能量都以热的形式散失,利用温差发电进行余热回收潜力巨大。燃料电池一般运行温度为60-90℃,本项目瞄准市场上无100℃以下温差发电产品的空白,通过新材料、新工艺和新方案创新性地设计出一套余热能量回收系统,可以同时实现散热和发电,把需要耗能的冷却系统变为发电装置,直接提高燃料电池的能效。产品代表性成果发表在《Cel》旗下子刊《iScience》期刊,且已实际应用于中车某氢燃料电池动力总成。

项目名称:多模态偏心转向驱动集成智能运载体
全部作者:赵婉彤、闫思言、刘睿霖、王可心、金泓旭、梁嘉琳
指导老师:董鹏、徐向阳、王书翰
项目介绍:
本产品是一种兼具灵活性、紧凑性、平稳性、优越避障性能的模块化智能移动平台。采用偏心盘、角驱动、滑板底盘的思路,将偏心、转向、驱动集成一体,首次提出多模态偏心转向驱动集成智能运载体方案,具有以下优势:四轮独立驱动一动力性强:四轮独立转向一灵活性强;360°偏心运动一越障性能强;偏心+惯导模块一姿态稳定可控。
本产品可更换滑板车身、添加功能模块接口,从而实现应用场景全覆盖。构建移动平台新蓝图,引领智能小车新时代。

项目名称:点对点自主飞行的“可视听“飞车
全部作者:梁德超、王苑硕、汪军宏、徐瑜、胡粟杰、许超、魏翔
指导老师:熊峻江、朱云涛
项目介绍:
基于21世纪以来日趋严重的城市交通堵塞问题,本项目提出具有视听功能、可实现点对点自主飞行的飞行汽车的构想,并实现了以下创新:自行设计了结构方案及布局,实现垂直起降与高效率固定翼巡航的结合,兼具汽车地面行驶、旋翼机垂直起降、定翼机空中巡航的功能;设计实现了可折叠机翼机构,减小飞车在地面占用的空间;增加智能化功能,包括语音交互和智能避障功能,从而实现与汽车共同上路行驶的点对点交通,更加便捷灵活。

项目名称:一种仿枫树种子双机组合式无人机
全部作者:武荟怡、王楠、卞恩赐、杨健辉、杜文远
指导老师:唐鹏、张艳来
项目介绍将两架模仿枫树种子外形和飞行方式的单旋翼飞行器组合起来成为固定翼飞行器。设计弹射分离机构,令二者可在空中分体,各自飞行。该飞行器的主要创新在于:同时满足固定翼和单旋翼飞行的气动设计,采用无尾布局、分体后机身丢弃的分离策略:单旋翼结构设计,采用单电机控制运动,空中分离弹射机构设计,提供初速度和距离,保证分离后两单旋翼运动互不干扰。
此飞行器兼具单旋翼可以悬停和固定翼续航能力强、飞行速度高的优势。可用于完成多目标轰炸等多线程任务,也可用于军事侦察等情报获取任务,拥有广阔应用前景。
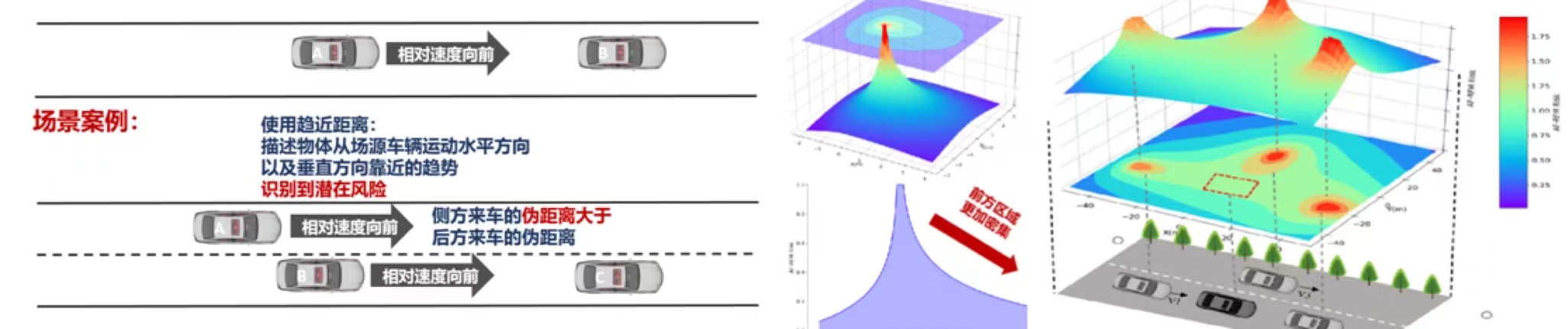
项目名称:基于场论的交叉口车辆运行动态风险评估及预警方法
全部作者:刘豆豆、吴思漫、韦圣睿
指导老师:刘淼淼
项目介绍:
随着智能网联车辆的发展,有效的车辆运行动态风险评估方法愈发重要。本研究针对传统的车辆运行动态风险评估方法计算效率差、无法考虑运动状态和趋势的缺陷提出一种考虑趋近特征的车辆运行动态风险场模型(Risk Field Model Considering Approach Feature,AF.RFM模型),构建风险预警方法并基于此开发交叉口车辆运行动态风险评估及预警系统,并进行了实地测试。
本研究基于场论提出两个创新点:一是提出“场源"概念,选取目标车辆作为“场源”,视为静止状态,用相对速度描述其他物体的运动状态。实现复杂环境下的标准化建模。二是使用趋近参数伪距离,描述物体从场源车辆运动水平方向以及垂直方向靠近的趋势识别到潜在风险。
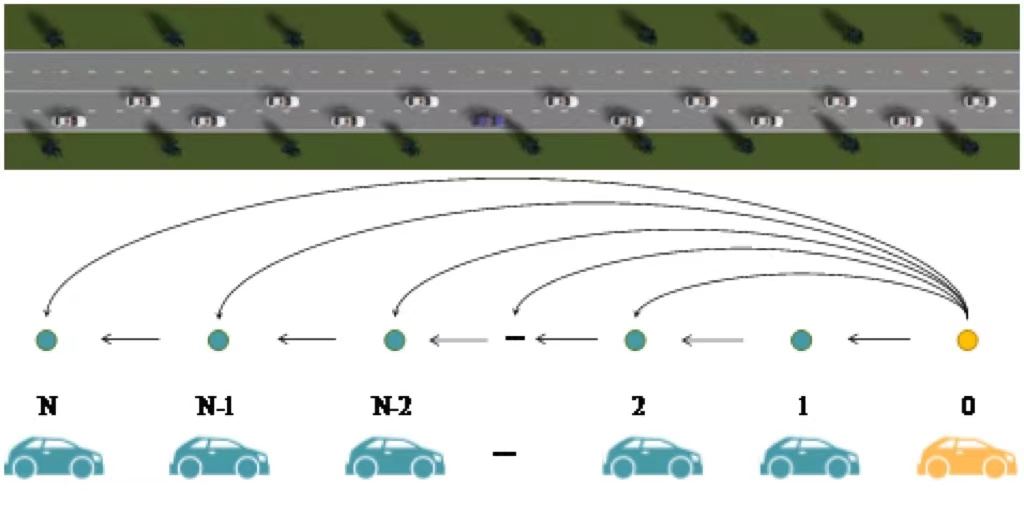
项目名称:面向网联自动驾驶车辆队列的协同换道控制方法
全部作者:吴思霖、李昂、石赞、龚筱英
指导老师:刘淼淼
项目介绍:
本项目依托科技部雄安新区科技创新专项项目“智能网联环境下的车路安全微观仿真与运动优化技术”,提出了一种面向网联自动驾驶车辆队列的协同换道控制方法,可实现自动驾驶队列间的安全、高效协同换道。
本项目创新性地将前车跟随式PF与前车-领航跟随式PLF的控制方法结合,提出了基于正弦函数曲线的动态换道轨迹规划方法,得到了不同队列速度差下换道车辆的最佳插入位置选择方案,可使车辆队列的稳定时间与速度波动幅度降低超17%,可为未来自动驾驶环境下的多车协同控制提供技术和应用支持,促进智能交通相关产业的发展。研究成果已转化为一项专利和一篇论文。
交通学院高度重视学生创新能力培养,为学生参与科技创新实践活动保驾护航。学院常态化推进STIP本科生科创实践计划,覆盖学生212人,共产出51个项目,其中30个项目报名参加了本届“冯如杯”竞赛。

本届“冯如杯”竞赛,交通学院共报名47个项目,覆盖各个赛道。其中,本科生制作组22项、论文组15项、哲社组1项,研究生制作组5项,红旅赛道2项,产业赛道2项,参赛规模创历史新高。未来,学院将继续推进人才培养,积极支持学生参与创新创业实践活动,助力学生全面发展。
