近日,第三十五届“冯如杯”竞赛圆满落幕,交通科学与工程学院以卓越的组织能力和专业指导水平,在本届竞赛中表现亮眼。学院积极申报自主创新项目、悉心指导学生参赛团队,共斩获主赛道一等奖7项、二等奖7项、三等奖11项,红旅赛道金奖1项,产业赛道二等奖1项,获奖率高达70%,刷新我院参加“冯如杯”竞赛的最好成绩!具体获奖项目名单如下:
本科生制作组获奖名单
本科生论文组获奖名单
本科生哲社组、红旅赛道、产业赛道、研究生制作组获奖名单

5月18日上午,校长王云鹏、副校长邓怡莅临我院作品展区,在校团委书记刘洋,交通学院党委书记杨世春的陪同下,与交通学子参赛代表展开亲切交流,听取了关于飞行汽车、元镜智鉴项目的介绍,鼓励大家在科研道路上不断挑战自我,不断激发创新活力。王云鹏校长指出,空天科技的发展离不开多元融合和系统思维,希望同学们在科技创新的道路上不断拓展视野、打破壁垒,携手共绘未来交通的宏伟蓝图。


随后,王云鹏校长一行又来到受邀参展的中国人民大学附属中学“启航导师走进高中”展区,与启航导师代表、人大附中学子们展开深入交流。“仿生扑翼飞行器”是交通学院吴江浩教授团队在人大附中开设的科研课堂,旨在探索大中协同、贯通培养新路径。


交流期间,王云鹏校长充分关心了同学们在冯如杯项目中的收获与感悟,鼓励同学们要立足现有项目基础,融入多样化功能模块,紧抓智能化发展趋势持续深入探索。
部分优秀项目展示
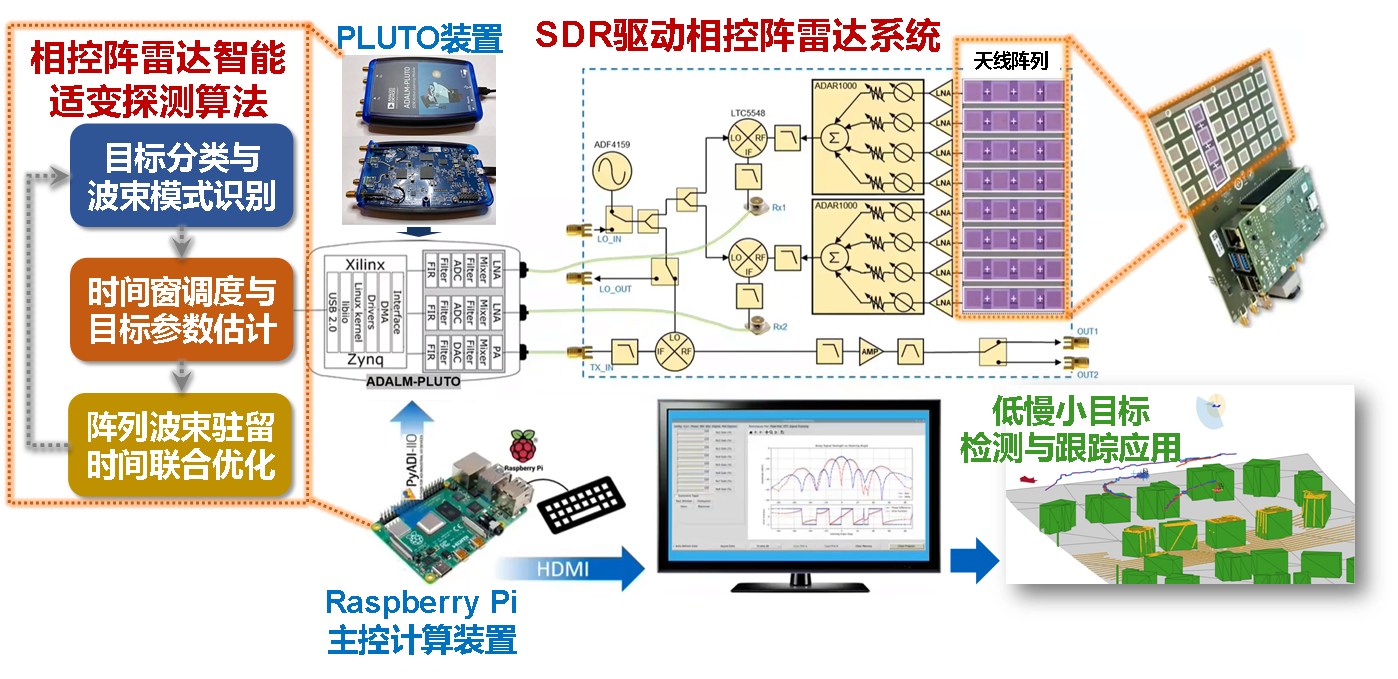
低空猎影——面向低慢小目标实时跟踪的软件无线电驱动相控阵雷达智能适变探测系统

全部作者:谷香,彭昊俐,刘冬阳,张一驰,吴思漫
指导老师:周建山,田大新
项目介绍:
低空、慢速、小型(低慢小)运动目标的全天候探测与跟踪是当前空-天-信交叉领域的核心挑战。
本项目融合先进人工智能模型算法、软件无线电及微天线阵列技术,研发低慢小目标智能适变探测技术,集成发展出相控阵雷达原型系统。对原型系统开展实地验证,证明其探测跟踪性能良好。
项目成果在某立体跨域无人平台和河南省“车路空天”一体化感知系统工程中得到应用,为低慢小目标实时探测与跟踪提供关键技术与原型系统。
低空智擎——仿鹞鹰折叠翼倾转旋翼飞行汽车


全部作者:许家铜、储皓然、李佳轩、龚思鸣、郭澍勋、陈锦鹏、王宏翔
指导老师:陈飞、曹耀光、彭朝霞
项目介绍:
飞行汽车是发展低空经济的核心载体。现有构型设计存在无法兼顾地面灵活性与空中机动性、续航时间短、安全保障不足等问题。
针对以上难点,团队自主设计研发仿鹞鹰陆空两栖一体式飞行汽车,提出仿鹞鹰陆空两栖构型设计、智能混合动力系统、空地协同感知与飞行控制技术等三大创新点。
团队已研制出1:4缩比样机,并完成了地面行驶、垂直起降、空中巡航等验证工作。
陆行灵动——新能源汽车线控角模块“可重构”底盘平台


全部作者:覃佳丽,孔德烨,冷贵彬,曾祥文,刘雨彤,梁嘉琳,鞠梓尹
指导老师:王书翰,徐向阳,董鹏
项目介绍:
团队针对新能源汽车底盘的线控智能化需求,创新性地构建了一套高集成度、低簧下质量、强操稳性、可与底盘即插即用的三代角模块产品技术体系。
以"单机械接口标准化设计"为核心理念,通过驱动、制动、转向、悬架系统的协同创新,打造出了即插即用、可覆盖18款无人多功能车型应用需求的线控角模块解决方案。
对促进我国新能源汽车产业发展、推动新型式底盘构架技术攻关具有重要理论价值和现实工程意义。
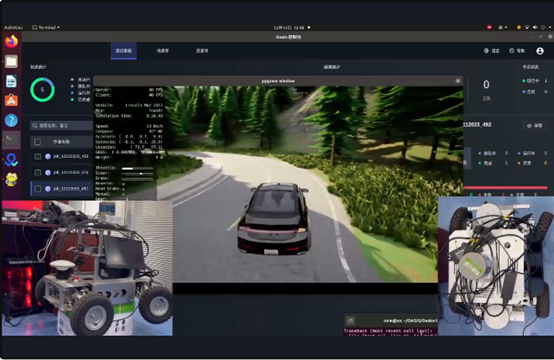
元镜智鉴——自动驾驶智能安全虚实孪生测试验证平台

全部作者:章锦川、崔少南、谷香、冯准
指导老师:任毅龙、于海洋、崔志勇
项目介绍:
“元镜智鉴”团队面向自动驾驶存在的智能安全隐患,自主研发自动驾驶智能安全虚实孪生测试验证平台,深入挖掘智能算法漏洞。
平台创新打造“测试场景智能生成—高维空间加速测试—虚实孪生测试验证”技术路线,场景覆盖度、攻击成功率、测试效率、虚实同步误差等关键指标均达到行业领先水平。
平台已针对特斯拉、问界等11款主流车型进行详细测试,与信长城、德清等多家企业达成合作,综合测试效率提升一个数量级。
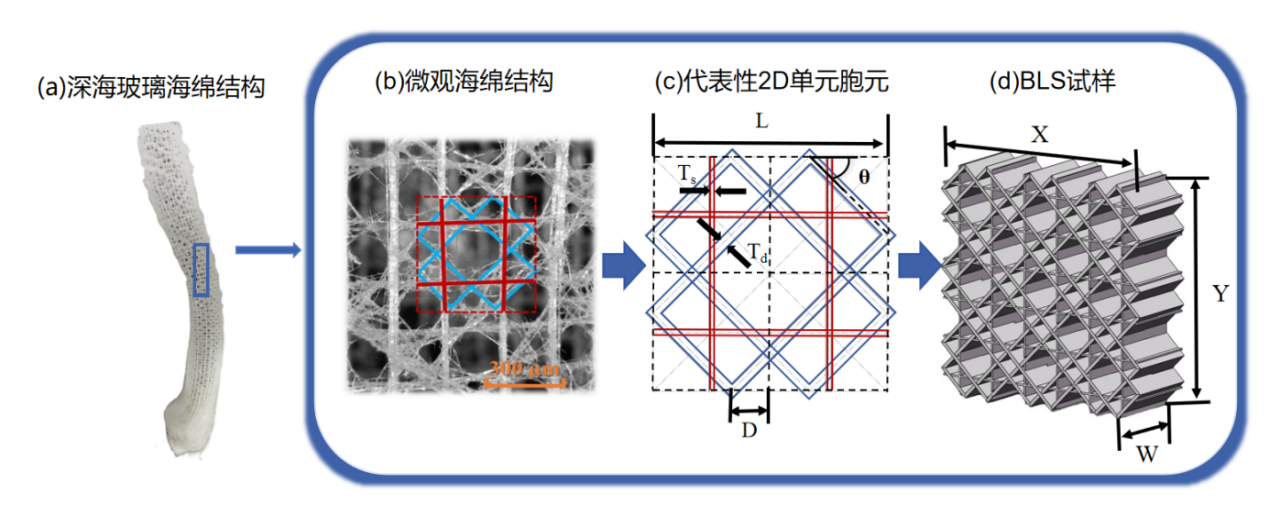
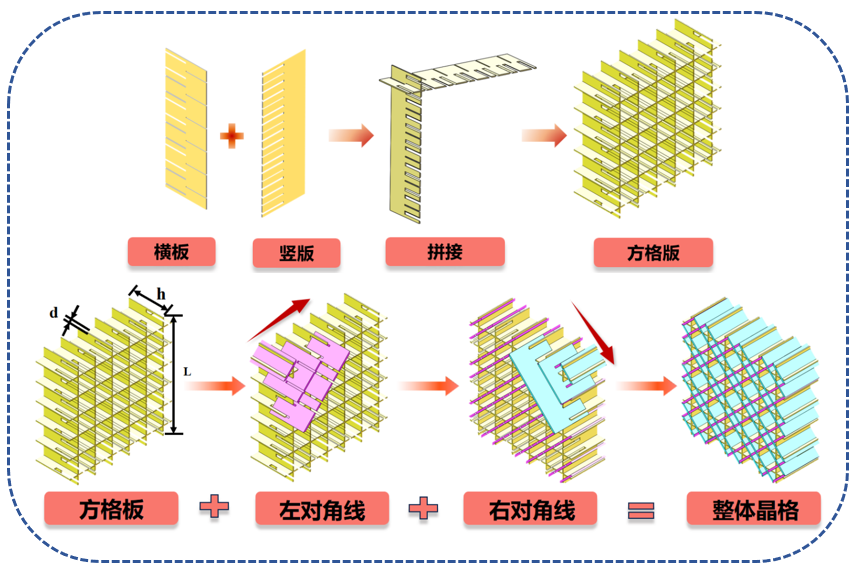
受深海玻璃海绵启发的可组装力学超材料
全部作者:王慧赟、熊奕乐、林志芊、李源
指导老师:胡大勇、张宏博、彭豪杰
项目介绍:
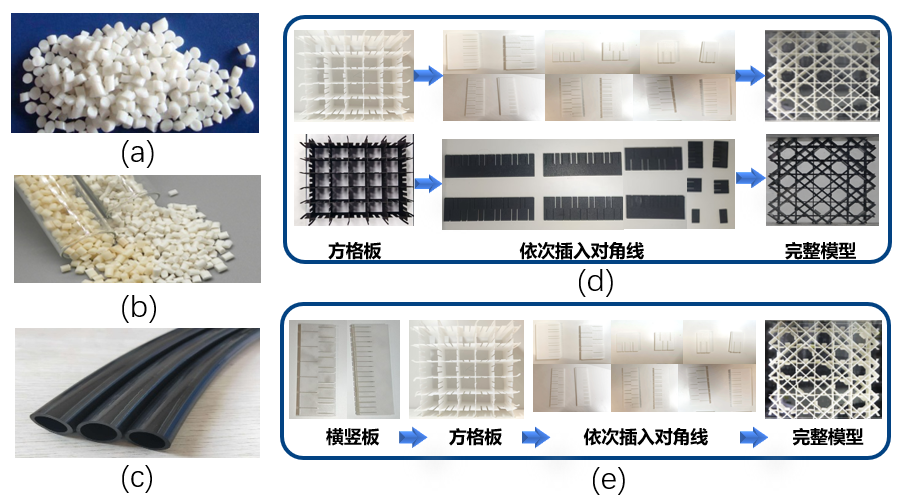
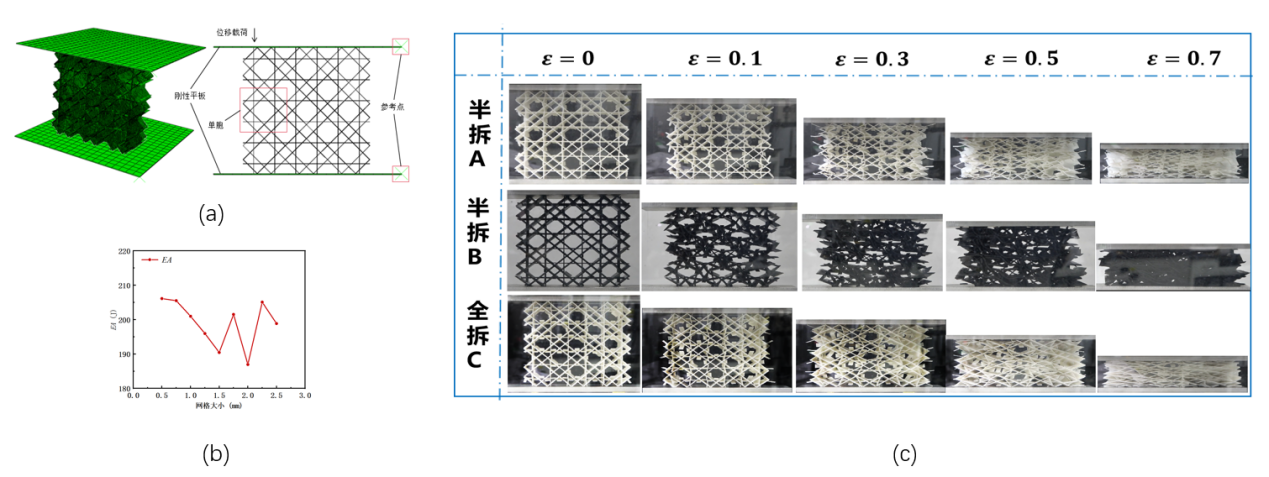
本项目受深海玻璃海绵骨架结构启发,将“仿海绵结构”与“可组装超材料”结合,设计出具有完全对称胞元的仿生点阵结构(BLS)(如图 1)和全拆、半拆两种拼装方案(如图 2),并通过3D打印技术选用TPU、PLA和PA11材料制备半拆A、半拆B、全拆C三种试样,如图 3。经准静态压缩试验和有限元模拟(如图 4)验证,该可组装力学超材料吸能性能良好,比吸能和承载能力高,突破了传统超材料应用局限,为可编程力学超材料设计提供新途径。
大学生科普“浅表化”困境的破解之道——以工信部直属七校“翱翔之翼”协同治理为例


全部作者:王楷文、高青松、张雨馨、杨思懿、王启越
指导老师:张静、张迎晨、张荣荣
项目介绍:
在国家创新驱动与全民科学素养提升背景下,当前高校科普实践面临“浅表化”困境,难以实现长效机制与深度融合。本文以推动科普模式向新阶段转型为目标,构建基于多校联盟与多元协同的合作机制,提出“2大主体协同+3大治理协同+4大维度协同”的靶向协同科普体系,打破时空内容局限,提升精准性、系统性与可持续性。通过对“翱翔之翼”实践项目的实证研究,验证该模式的可行性与推广价值,为高校科普生态构建提供理论支持与实践路径。
交通学院高度重视学生创新能力培养,积极搭建平台、营造氛围、强化指导。学院常态化推进STIP本科生科创实践计划,本期计划已征集20个科研课题,18位科创导师、20余位科创梦拓对参与计划的本科生进行全面的科研指导。
本届“冯如杯”竞赛,交通学院共报名39个项目,覆盖各个赛道。其中,本科生制作组16项、论文组15项、哲社组1项,研究生制作组3项,红旅赛道1项,产业赛道1项,创意赛道2项,参赛热情高涨不减。

期待全院学子以获奖同学为榜样,积极投身科研创新实践,再创佳绩!学院也将持续优化支持体系,为学子们的科创梦想保驾护航!
